Site pages
Current course
Participants
General
MODULE 1. Analysis of Statically Determinate Beams
MODULE 2. Analysis of Statically Indeterminate Beams
MODULE 3. Columns and Struts
MODULE 4. Riveted and Welded Connections
MODULE 5. Stability Analysis of Gravity Dams
Keywords
LESSON 24. Beam-Column
A structural member subjected simultaneously to bending moment (like beam) and axial load (like column) is called Beam-Column. The bending moment in beam-column may be induced by transverse load (Figure 24.1a) or eccentricity of the axial load (Figure 24.1b).
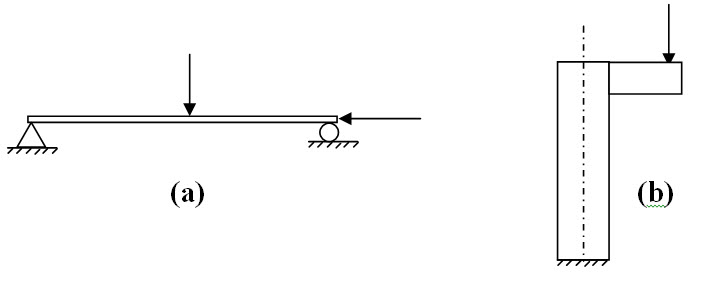
Fig. 24.1.
In this lesson we will derive the governing differential equation for beam-column and illustrate its application in different problems.
24.1 Differential Equation for Beam-Column
Consider a slender member subjected simultaneously to an arbitrary lateral load and an axial load as shown in Figure 24.2a. Free body diagram of an infinitesimal segment dx, in its deformed configuration is shown in Figure
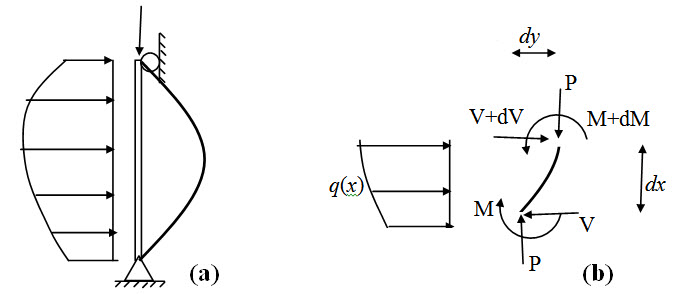
Fig. 24.2.
Applying the static equilibrium conditions,
\[\sum{{F_x}=0}\Rightarrow V + dV - V + q(x)dx\]
\[{{dV} \over {dx}}=-q(x)\] (24.1)
\[\sum {M = 0}\Rightarrow-\left( {M + dM} \right) + M + Vdx + Pdy + qdx{{dx} \over 2}=0\]
\[\Rightarrow-{{dM} \over {dx}} + P{{dy} \over {dx}}=-V\] [ Neglecting second order term (dx)2] (24.2)
Differentiating Equation (24.2) with respect to y,
\[\Rightarrow-{{{d^2}M} \over {d{x^2}}} + {d \over {dx}}\left( {P{{dy} \over {dx}}} \right)=-{{dV} \over {dx}}\] (24.3)
From the equation of elastic line, we have,
\[{{{d^2}y} \over {d{x^2}}}=-{M \over {EI}}\] (24.4)
Substituting Equations (24.1) and (24.4), Equation (24.3) becomes,
\[{{{d^4}y} \over {d{x^4}}} + {d \over {dx}}\left( {P{{dy} \over {dx}}} \right)=q(x)\] (24.5)
Equation (24.5) is the beam-column governing differential equation.
Example
Consider a beam colum subjected simultaneously to a transverse load Q at its mid-span and axial compressive force P as shown in Figure 24.3a.
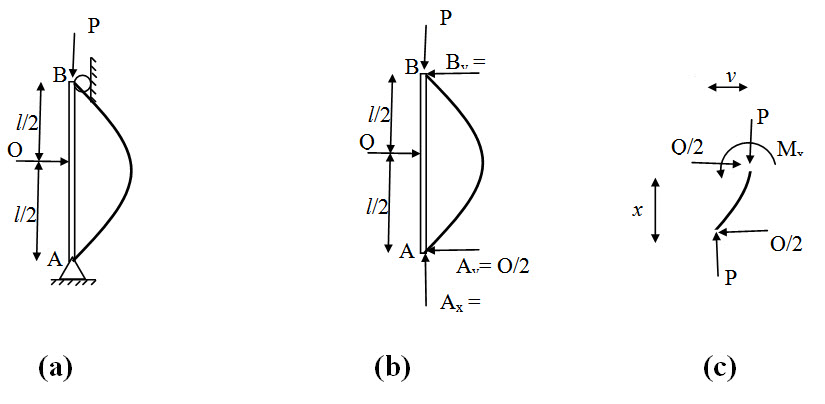
Fig. 24.3.
From Free body diagram of the whole structure (Figure 24.3b), support reactions are,
\[{A_x} = P\] and \[{A_y} = {B_y} = Q/2\]
From Free body diagram Figure 24.3c,
\[\sum {{M_x} = 0}\Rightarrow-{M_x} + {Q \over 2}x + Py = 0\] for \[0 \le x \le l/2\] (24.6)
Substituting equation of elastic line (Equation 24.4) into Equation 24.6, we have,
\[EI{{{d^2}y} \over {d{x^2}}} + {Q \over 2}x + Py = 0\] (24.7)
\[\Rightarrow {{{d^2}y} \over {d{x^2}}} + {k^2}y=-{{Qx} \over {2P}}{k^2}\] \[\left[ {{k^2}={P \over {EI}}} \right]\] (24.8)
The general solution of the above differential equation,
\[y = {y_h} + {y_p}\] (24.8)
Homogeneous solution yh is,
\[{y_h}=A\cos kx + B\sin kx\] (24.10)
Particular solution yp is,
\[{y_p}=C + Dx\] (24.11)
Substituting yp into Equation (24.8),
\[{{{d^2}{y_p}}\over{d{x^2}}}+{k^2}{y_p}=-{{Qx}\over{2P}}{k^2}\]
\[\Rightarrow{k^2}\left({C+Dx}\right)=-{{Qx}\over{2P}}{k^2}\]
\[\Rightarrow C=0\] and \[D=-{Q \over {2P}}\]
Therefore,
\[y=A\cos kx + B\sin kx -{{Qx}\over{2P}}\] (24.12)
Constants A and B are determined from the following boundary conditions,
y = 0 at x =0 \[\Rightarrow A=0\]
\[{{dy} \over {dx}}=0\] at x = l/2
\[Bk\cos \left( {\frac{{kl}}{2}} \right) - \frac{Q}{{2P}} = 0 \Rightarrow B = \frac{Q}{{2Pk\cos \left( {\frac{{kl}}{2}} \right)}}\]
Therefore,
\[y = \frac{{Q\sin kx}}{{2Pk\cos \left( {\frac{{kl}}{2}} \right)}} - \frac{{Qx}}{{2P}}\] for \[0 \le x \le l/2\] (24.13)
In this case the maximum displacement occurs at the mid-span,
\[{y_{\max }}=\frac{{Q\sin\left({\frac{{kl}}{2}}\right)}}{{2Pk\cos\left({\frac{{kl}}{2}}\right)}}-\frac{{Ql}}{{4P}}=\frac{Q}{{2Pk}}\left[{\tan\left({\frac{{kl}}{2}} \right)-\frac{{kl}}{2}}\right]\]
\[\Rightarrow {y_{\max }}=\frac{{Q{l^3}{k^2}}}{{2Pk{}^3{l^3}}}\left[{\tan\left({\frac{{kl}}{2}}\right) -\frac{{kl}}{2}}\right]\]
\[\Rightarrow {y_{\max }}=\frac{{Q{l^3}}}{{48EI}}\left[{\frac{{3\left({\tan\alpha-\alpha}\right)}}{{{\alpha^3}}}}\right]\] \[\left[{\alpha=\frac{{kl}}{2}}\right]\]
\[\Rightarrow {y_{\max}}={y_0}\left[{\frac{{3\left({\tan\alpha-\alpha}\right)}}{{{\alpha^3}}}}\right]\]............(24.14)
where, \[{y_0}={{Q{l^3}} \over {48EI}}\] is the deflection at the mid-span when P = 0.
Now, series expansion of \[\tan \alpha\] is ,
\[\tan \alpha=\alpha+{{{\alpha ^3}} \over 3}+{{2{\alpha ^5}} \over {15}}+{{17{\alpha ^7}}\over {315}}+\cdots\]
\[\Rightarrow {{3\left({\tan \alpha-\alpha } \right)}\over {{\alpha ^3}}}=1+{{2{\alpha ^2}}\over 5}+{{17{\alpha ^4}}\over{105}}+\cdots\]
Therefore,
\[{y_{\max }}={y_0}\left( {1+{{2{\alpha ^2}} \over 5}+{{17{\alpha ^4}}\over{105}}+\cdots } \right)\] (24.15)
Now,
\[{\alpha ^2}={{{k^2}{l^2}} \over 4}={{P{l^2}} \over {4EI}}=2.46{P \over {{P_E}}}\] \[\left[ {{P_E}={{{\pi ^2}EI} \over {{l^2}}}} \right]\]
Hence,
\[{y_{\max }}={y_0}\left( {1+0.984{P \over {{P_E}}}+0.998{{\left( {{P \over {{P_E}}}}\right)}^2}+\cdots }\right)\]
\[{y_{\max }}={y_0}\left({1+{P \over {{P_E}}}+{{\left({{P \over {{P_E}}}} \right)}^2}+\cdots } \right)\]
\[={y_{\max }}={y_0}{1 \over {1 - P/{P_E}}}\] [From power series sum for ] (24.16)
The factor \[{1 \over {1 - P/{P_E}}}\] is called the amplification factor or magnification factor.
The Maximum bending moment,
\[{M_{\max }}={Q \over 2}{l \over 2} + P{y_{\max }}\]
\[\Rightarrow {M_{\max }}={{Ql} \over 4} + {{PQ{l^3}} \over {48EI}}{1 \over {1 - P/{P_E}}}\]
\[\Rightarrow {M_{\max }}={{Ql} \over 4}\left( {1 + {{P{l^2}} \over {12EI}}{1 \over {1 - P/{P_E}}}} \right)\]
\[\Rightarrow {M_{\max }}={{Ql} \over 4}\left( {1 + 0.82{P \over {{P_E}}}{1 \over {1 - P/{P_E}}}} \right)\]\[\left[ {{\rm{substituting }}{P_E}= {{{\pi ^2}EI} \over {{l^2}}}} \right]\]
\[\Rightarrow {M_{\max }}={{Ql} \over 4}\left( {{{1 - 0.18P/{P_E}} \over {1 - P/{P_E}}}} \right)\]
The term \[\left( {{{1 - 0.18P/{P_E}} \over {1 - P/{P_E}}}} \right)\] is called amplification factor for bending moment due to axial load.
Suggested Readings
Yoo, C.H., Lee, S.C. (2011). Stability of Structures: Principles and Applications. Elsevier.
Gere, J.M, Timoshenko S.P. (2010). Theory of Elastic Stability. Second Edition, Tata McGraw - Hill Education.
Last modified: Saturday, 21 September 2013, 10:09 AM