Site pages
Current course
Participants
General
Module 1. Tractor Mechanics
Module 2. Traction
Module 3. Introduction to Transmission System
Module 4. Clutch System
Module 5. Gear Box
Module 6. Differential and Final drive
Module 7. Brakes
Module 8. Steering system
Module 9. Hydraulics
Module 10. Power Transmission
Lesson 24. Analysis of steering-Turning radius. Ackerman Steering
Analysis of Steering angle
For perfect steering, all wheels need to be rolling perfectly without scuffing. Under normal turning conditions, both the front steering wheels point in the same direction, often resulting in scrubbing and not a perfect rolling. During turning, the outer wheels move around a track which has larger turning radius as compared to the inner wheel.
The steering proposed by Erasmus Darwin in 1758 was patented by Rudolf Ackerman in 1817 is called Ackerman steering and is described below.
Fig. 24.1 shows the various linkages for going in a straight ahead situation. Fig 24.1 also shows the position of linkage for turning towards the right (lock position). For perfect steering in the locked position, the axes of all the wheels should appear to be meeting at one point, which is called the instantaneous turning centre.
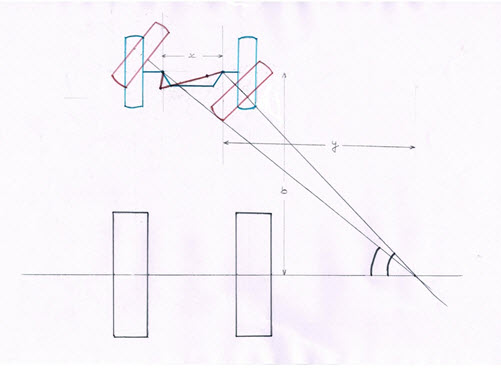
From Fig 24.1,
Tan \[\phi \] = wheelbase, b - (1)
x+y
Tan θ = wheelbase, b - (2)
y
θ - angle of inside lock
f - angle of outside lock
Subtracting (2) from (1)
Cot \[\phi \] - cot θ = x/b - (3)
Ackerman steering
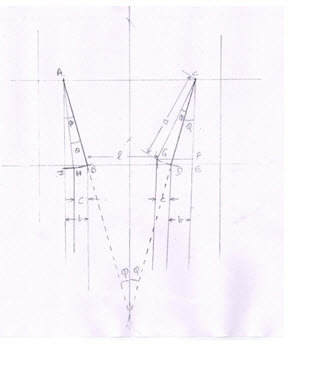
The Fig 24.2 has been derived from Fig 24.1.
AB and CD are the steering links from the two stub axles, each having a length of ‘a’.
BD is the tie rod of length ‘l’ between the two steering links.
The steering links AB and CD make an angle ‘φ‘ each with the lateral line about which the steering is symmetrical.
Now when the steering is turned to the right extreme, lock position, the steering link CD turns left by an angle ‘\[\phi \] and the link AB correspondingly turns left by an angle ‘θ’.
From the Fig 24.2,
In triangle CDE
Sin φ = b/a - (4)
In triangle CFG
Sin (φ+\[\phi \]) = (b+c)/a - (5)
In triangle AHJ
Sin (φ-θ) = (b-c)/a - (6)
Adding (5) and (6)
Sin (φ+\[\phi \]) + Sin (φ-θ) = (b+c)/a + (b-c)/a
= 2 (b/a) = 2 (Sin φ) - (7)
This relation for Ackerman steering holds for three cases i.e. when moving straight ahead, lock position to the right and lock position to the left.
Last modified: Monday, 3 March 2014, 6:25 AM