Site pages
Current course
Participants
General
Module 1. Introduction to Theory of Machine
Module 2. Planar Mechanism
Module 3. Velocity and Acceleration Analysis
15 March - 21 March
22 March - 28 March
29 March - 4 April
5 April - 11 April
12 April - 18 April
19 April - 25 April
26 April - 2 May
Lesson 7.
7.1 ARONHOLD-KENNEDY THEOREM
It states that "if three bodies, having relative motion with respect to each other will have three I-centres all of which lies on the same line". It is very useful in the mechanism where there are three links and will have three I-centres, if two them are known then third will lie on the line joining the two I-centres.
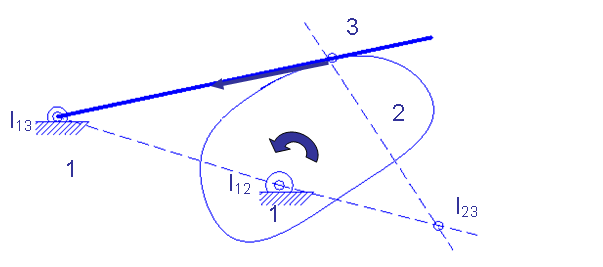
Fig. 3.11 Aronhold –Kennedy’s theorem
as shown in the above figure 3.11, the I-centre I13 and I12 are located by observation , then the third I-centre I23 will lie on the line extended from I13 & I12 and cutting the line perpendicular to the velocity .
7.2 METHOD FOR LOCATING I-CENTRE
Step 1. The number of I-centre in a four bar mechanism is
\[n = \frac{{n(n - 1)}}{2}\]
Where n = No. of links
The number of I-centre in a four bar mechanism will be
\[\frac{{{\text{4}} \times \left( {{\text{4}} - {\text{1}}} \right)}}{{\text{2}}} = {\text{6}}\] .
So there are 6 I-centre in a four bar mechanism
Step 2. These I-centre’s is shown below
|
Links |
1 |
2 |
3 |
4 |
|
I-centre’s |
I12 |
I23 |
I34 |
- |
|
I13 |
I24 |
- |
- |
|
|
I14 |
- |
- |
- |
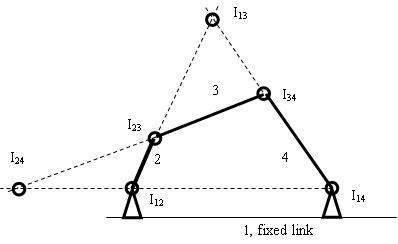
Fig. 3.12
Step 3. I12 and I14 are found to be fixed I-centre because they will change their position during the rotation of crank or at any position of crank. The I23 and I34 are permanent types of I-centre as they will change during crank movement but will remain at the joint of link 2 & 3.
Step 4. I13 and I24 are secondary I-centre and are located by circle diagram given below.
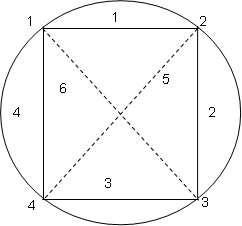
Fig. 3.13 circle diagram
Take four points 1, 2, 3 and 4 on the circle equal to the number of links in the mechanism. Join these point by solid lines 1-2,2-3,3-4 and 4-1.These lines will be specify the I-centre’s I12,I23,I34 and I14.Two remaining I-centre’s I24 and I13 are located by joining points 1 to 3 and 2 to 4 showed by dotted lines.
7.3 TYPES OF I-CENTRE
There are basically three types of I-centre Fixed, Permanent, Neither fixed nor permanent
The fixed I-centre means its location will remain same during the relative motion between the links because one of the links involve is fixed to the ground as I-centres I12 & I14 in the figure 3.12. The permanent I-centres are those whose location will change depending on the position of links but they will remain at permanent joining points of the two links as I-centres I23 & I34 in figure 3.12. The remaining two I-centres I24 & I13 are neither fixed nor permanent types of I-centres as it will change continuously depending on the location of other I-centres.
Example: 3.2 Slider-crank mechanism has a crank length of 125 mm which is rotating at 600 r.p.m. (clockwise direction). Find the velocity of slider and angular velocity of connecting rod if the length of connecting rod is 500 mm and crank makes an angle of 450 with the inner dead centre.
Solution:
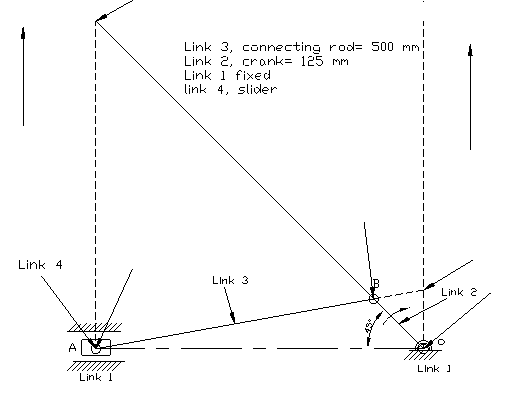
Fig.3.14 slider crank mechanism
Find the number and location of all the I-centers by following the method as describe in above article. Then, Locate the fixed and permanent I-centre I12,I34 and I 23 by inspection. As slider (link 4) moves in a straight line so I-centre I14 will lie at infinity. Locate remaining two I-centre’s I24 and I13 by using Kennedy theorem.
By measuring from the above diagram we can have
I13A = 581 mm
I13B = 690 mm
Velocity of slider A
\[\omega\times {\text{OB}} = \frac{{{\text{2}}\pi\times {\text{6}}00}}{{{\text{6}}0}}{\text{ = 62}}.{\text{9}}0{\text{rad/s}}\]
\[{{\text{V}}_B}{\text{=}}{\omega _{{\text{OB}}}} \times {\text{OB = 62}}.{\text{9}}0 \times 0.{\text{125 = 7}}.{\text{86 m}}/{\text{s}}\]
\[\frac{{{{\text{V}}_{\text{A}}}}}{{{{\text{I}}_{{\text{13}}}}{\text{A}}}}= \frac{{{{\text{V}}_{\text{B}}}}}{{{{\text{I}}_{{\text{13}}}}{\text{B}}}},{V_A} = 0.{\text{581}} \times {\text{7}}.{\text{86}}/0.{\text{69}} = {\text{6}}.{\text{61m/sec}}\]
Angular velocity of connecting rod
\[{\omega_{AB}}{\text{=}}\frac{{{{\text{V}}_{\text{A}}}}}{{{{\text{I}}_{{\text{13}}}}{\text{A}}}}= \frac{{{\text{6}}.{\text{61}}}}{{0.{\text{581}}}} = {\text{11}}.{\text{37rad}}/{\text{s}}\]
Example 3.3: Find the linear velocities of the points B, C & D by using I-centre method and also find the angular velocities of the links AB, BC and CD for the diagram shown below.
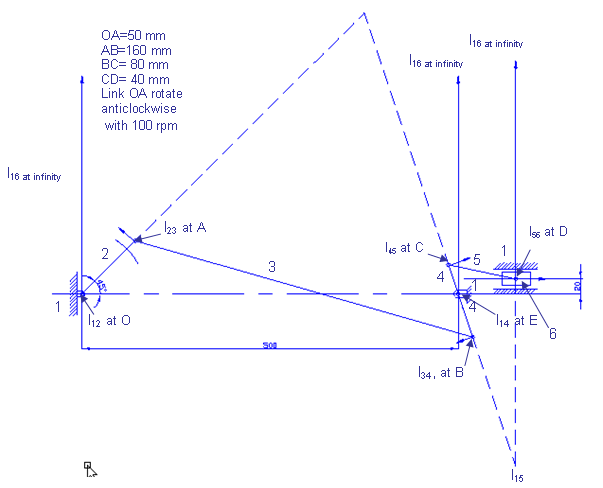
Fig: 3.15
Solution:
Step 1. Write down all the I-center’s in the table
|
I12 |
I23 |
I34 |
I45 |
I56 |
|
I13 |
I24 |
I35 |
I46 |
|
|
I14 |
I25 |
I36 |
|
|
|
I15 |
I26 |
|
|
|
|
I16 |
|
|
|
|
Step 2. Locate all the fixed and permanent I-centre by inspection
I12,I23, I34,I45, I56,I16, I14
Step 3. Locate I-centre I15 by using Kennedy theorem as it will be used in finding the slider velocity
Step 4. Locate I13 by Kennedy theorem as it is common I-center of points A and B.
Step 5. find VA= ω × OA
Step 6. considering I-center I13 because point A and point B rotate about this I-center and have zero velocity at this point. So use
eq. \[\frac{{{V_A}}}{{{I_{13}}A}} = \frac{{{V_B}}}{{{I_{13}}B}}\] and find VB
Step 7. similarly, considering I-center I14, use eq. \[\frac{{{V_B}}}{{{I_{14}}B}} = \frac{{{V_C}}}{{{I_{14}}C}}\] and find VC
Step 8. similarly, considering I-center I15, use eq. \[\frac{{{V_C}}}{{{I_{15}}C}} = \frac{{{V_D}}}{{{I_{15}}D}}\] and find VD
Angular velocity of links AB can be found by using eq. \[{\omega _{AB}} = \frac{{{V_A}}}{{A{I_{13}}}}\]
Similarly find velocities for links BC and CD
Last modified: Tuesday, 25 March 2014, 9:56 AM